自動水やりを目指して購入したRaspberryPi4ですが、今回の目的に使えそうな下記のキットを購入しました。
[blogcard url=”https://www.amazon.co.jp/dp/B0798DYZQW”]
使う予定なのは、サーボと温度・湿度、土壌湿度センサーでしょうか。ラズパイも電子工作も素人なので、まずは各パーツを試していきます。
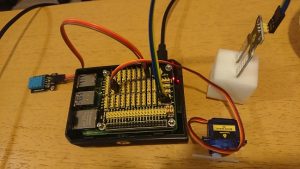
LABISTS Raspberry4のケースには合わないですが、とりあえず、GPIO-PCF8591 Shieldを取り付けて、使用するパーツを指してみます。
最初に、サーボを試してみます。KEYSTUDIOのサイトですが、C言語ですね。。お久しぶりです。pythonでやりたいところですが、まずは動作確認でキットのサイトにあるコードをそのままやってみます。下記はMakefileです。
Servo:Servo.o
gcc Servo.c -o Servo -lwiringPi
Makefileのタブが曲者ですね。
pi@raspberrypi:~/lesson/19 $ ls
Makefile Servo.c
pi@raspberrypi:~/lesson/19 $ make
cc -c -o Servo.o Servo.c
gcc Servo.c -o Servo -lwiringPi
pi@raspberrypi:~/lesson/19 $ ls
Makefile Servo Servo.c Servo.o
コンパイル出来たようです。
pi@raspberrypi:~/lesson/19 $ sudo ./Servo
、、、うんともすんとも動きませんね。。。
pi@raspberrypi:~/lesson/19 $ gpio readall
Oops - unable to determine board type... model: 17
gpioが使えていないようです。インストールはされているようですが、
pi@raspberrypi:~/lesson/19 $ dpkg -l wiringpi
要望=(U)不明/(I)インストール/(R)削除/(P)完全削除/(H)保持
| 状態=(N)無/(I)インストール済/(C)設定/(U)展開/(F)設定失敗/(H)半インストール/(W)
|/ エラー?=(空欄)無/(R)要再インストール (状態,エラーの大文字=異常)
||/ 名前 バージョン アーキテクチ 説明
+++-==============-============-============-===================================
ii wiringpi 2.50 armhf The wiringPi libraries, headers and
どうやら、バージョンが対応していないようです。コチラを参考にさせて頂き、バージョンアップしてみます。
pi@raspberrypi:~/lesson/19 $ gpio readall
+-----+-----+---------+------+---+---Pi 4B--+---+------+---------+-----+-----+
| BCM | wPi | Name | Mode | V | Physical | V | Mode | Name | wPi | BCM |
+-----+-----+---------+------+---+----++----+---+------+---------+-----+-----+
| | | 3.3v | | | 1 || 2 | | | 5v | | |
| 2 | 8 | SDA.1 | IN | 1 | 3 || 4 | | | 5v | | |
| 3 | 9 | SCL.1 | IN | 1 | 5 || 6 | | | 0v | | |
| 4 | 7 | GPIO. 7 | IN | 1 | 7 || 8 | 1 | IN | TxD | 15 | 14 |
| | | 0v | | | 9 || 10 | 1 | IN | RxD | 16 | 15 |
| 17 | 0 | GPIO. 0 | IN | 0 | 11 || 12 | 0 | IN | GPIO. 1 | 1 | 18 |
| 27 | 2 | GPIO. 2 | IN | 0 | 13 || 14 | | | 0v | | |
| 22 | 3 | GPIO. 3 | IN | 0 | 15 || 16 | 0 | IN | GPIO. 4 | 4 | 23 |
| | | 3.3v | | | 17 || 18 | 0 | IN | GPIO. 5 | 5 | 24 |
| 10 | 12 | MOSI | IN | 0 | 19 || 20 | | | 0v | | |
| 9 | 13 | MISO | IN | 0 | 21 || 22 | 0 | IN | GPIO. 6 | 6 | 25 |
| 11 | 14 | SCLK | IN | 0 | 23 || 24 | 1 | IN | CE0 | 10 | 8 |
| | | 0v | | | 25 || 26 | 1 | IN | CE1 | 11 | 7 |
| 0 | 30 | SDA.0 | IN | 1 | 27 || 28 | 1 | IN | SCL.0 | 31 | 1 |
| 5 | 21 | GPIO.21 | IN | 1 | 29 || 30 | | | 0v | | |
| 6 | 22 | GPIO.22 | IN | 1 | 31 || 32 | 0 | IN | GPIO.26 | 26 | 12 |
| 13 | 23 | GPIO.23 | IN | 0 | 33 || 34 | | | 0v | | |
| 19 | 24 | GPIO.24 | IN | 0 | 35 || 36 | 0 | IN | GPIO.27 | 27 | 16 |
| 26 | 25 | GPIO.25 | IN | 0 | 37 || 38 | 0 | IN | GPIO.28 | 28 | 20 |
| | | 0v | | | 39 || 40 | 0 | IN | GPIO.29 | 29 | 21 |
+-----+-----+---------+------+---+----++----+---+------+---------+-----+-----+
| BCM | wPi | Name | Mode | V | Physical | V | Mode | Name | wPi | BCM |
+-----+-----+---------+------+---+---Pi 4B--+---+------+---------+-----+-----+
Cのサンプルが動くようになりました。
Cのコードをそのまま、pythonに書き換えます。
import time
import wiringpi as w
#Define
INPUT=0
OUTPUT=1
HIGH=1
LOW=0
w.wiringPiSetup()
w.pinMode(1,OUTPUT)
while 1:
for i in range(50):
w.digitalWrite(1,HIGH)
time.sleep(1000 / 1000000.)
w.digitalWrite(1,LOW)
time.sleep(19 / 1000.)
time.sleep(1)
for i in range(50):
w.digitalWrite(1,HIGH)
time.sleep(2000 / 1000000.)
w.digitalWrite(1,LOW)
time.sleep(18 / 1000.)
time.sleep(1)
pi@raspberrypi:~ $ sudo python3 Servo.py
Traceback (most recent call last):
File "Servo.py", line 2, in
import wiringpi as w
ModuleNotFoundError: No module named 'wiringpi'
ライブラリが足りてませんでした。。
pi@raspberrypi:~ $ pip3 install wiringpi
Looking in indexes: https://pypi.org/simple, https://www.piwheels.org/simple
Collecting wiringpi
Downloading https://files.pythonhosted.org/packages/06/bf/7c4ec17172f72917707dddeacfa02eae80b56ad3b7b5674a4258e62b2f5a/wiringpi-2.60.0-cp37-cp37m-linux_armv7l.whl (285kB)
100% |????????????????????????????????| 286kB 495kB/s
Installing collected packages: wiringpi
Successfully installed wiringpi-2.60.0
実行してみます
pi@raspberrypi:~ $ python3 Servo.py
お、カチャカチャと動きだしました。細かい制御は難しそうなので後回しに、、
次は温度・湿度センサーです。